Period: 2015 - 2018
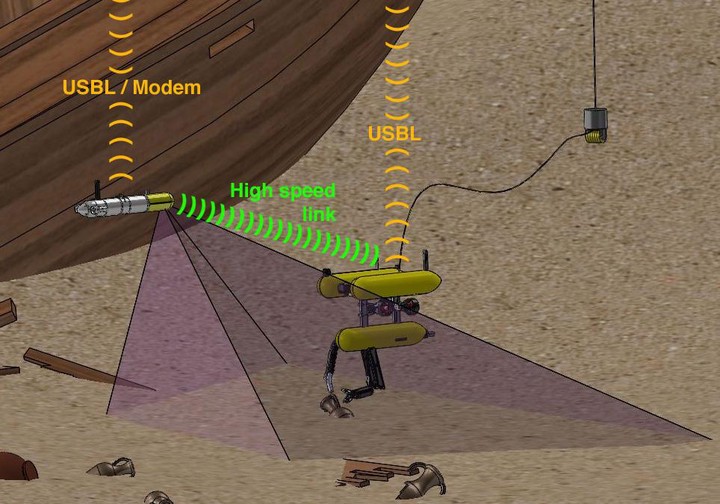
SUPERION is the UIB subproject of MERBOTS project. The other subprojects are ARCHROV, leaded by the University of Girona and MERMANIP, conducted by the University Jaume I, the coordinator of the project. MERBOTS is the natural evolution of RAUVI and TRITON projects. Even though both projects have led to a significant progress regarding all their challenging objectives, a serious advancement is needed regarding the robustness and the reliability of the corresponding systems, to achieve the perception capabilities required by the new scenario. The project focuses on underwater archeology, although the same technologies could be applied to other scenarios. Two distinctive missions have been envisioned: the first one, cooperative survey, consists in an autonomous survey of a predefined search area by means of an AUV assisted by a surface vehicle that provides absolute localization and communication; the second mission, a cooperative intervention, entails a semi-autonomous intervention by means of an HROV assisted by an AUV providing out-of-body views of the intervention. The UIB, leading the SUPERION subproject, is responsible for work packages centered on collecting optical data and providing 3D models of the area under study and seeking and modeling potential targets within the sensor data to assist the HROV operator. Thus, SUPERION focuses on two general objectives: enhance 3D reconstruction capabilities for underwater environments by means of optical sensors and improve target detection methods using multimodal sensor data. More specific sub-objectives stemming from the abovementioned are: (1) develop new stereo-SLAM methods to improve the self-localization capabilities of underwater vehicles and, thus, accurately derive the camera poses; (2) enhance 3D reconstruction methods able to deal successfully with the difficulties of underwater scenarios for both full scenes and targets; (3) develop new laser-based 3D modeling algorithms capable of underwater operation for increasing the level of detail at certain places of the environment, particularly the target area; (4) deal with multiple sensor modalities for improved scene modeling; (5) approach target detection in multimodal maps; (6) develop new target tracking methods making use of both 3D and visual-appearance models.